Want to know the encoder working principle? This article will introduce the working principle of the encoder. Here you can know the incremental encoder working principle, absolute encoder working principle, Rotary encoder working principle, and linear encoder working principle.
1. Incremental encoder working principle
An incremental encoder is a sensor used to measure rotation or linear motion. It outputs pulses during motion without providing absolute position information. Incremental encoders usually consist of two main parts: the encoder disk and the read head. The encoder disc usually has graduations or grooves on it, and the read head contains the sensor and signal processing circuitry.
Working principle:
Incremental encoders typically consist of an encoder disk mounted on a rotating shaft or linearly moving object. The encoder disc has a series of graduations or markings, the arrangement and number of which depend on the design of the encoder. This can be an optical grating, a magnetic mark, or another type of mark.
The read head located next to the encoder disk usually contains a photoelectric sensor or a magnetic sensor. The task of these sensors is to detect changes in the scale or markings on the encoder disc.
Incremental encoders provide real-time feedback on the relative position and direction of motion of an object by monitoring changes in scales or marks and converting these changes into pulse signals.
2. Absolute encoder working principle
An absolute encoder is a sensor used to measure the absolute position of an object. It directly outputs the absolute position information of the object in space without the need for cumulative counting of relative positions. This type of encoder is often used in applications that require high precision and accuracy, such as CNC machine tools, robot control, aerospace, etc.
Working principle:
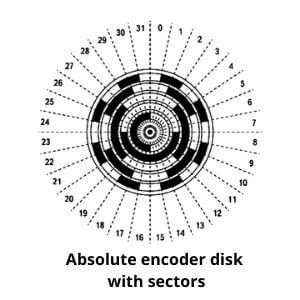
The operating principle of absolute encoders is based on the interaction between the code disk and the reading device. Typically, an absolute encoder consists of a rotating code wheel with a series of bits or marks. Each bit represents a specific location, and the combination of these bits is unique and can accurately represent the location of the object.
The reading device of an absolute encoder usually uses photoelectric or magnetic sensing technology to accurately read the bit information on the code disk. When the object moves, the reading device detects the changes in the bits on the code wheel to determine the exact location of the object. Different absolute value encoders may use different encoding rules, such as Gray code, binary encoding, etc.
3. Rotary encoder working principle
A rotary encoder is a sensor that measures the rotational movement of a shaft and converts this movement into an electrical signal. The working principle of a rotary encoder may vary depending on its type (e.g. optical, magnetic, etc.). Here is how one of the common types of optical rotary encoders works:
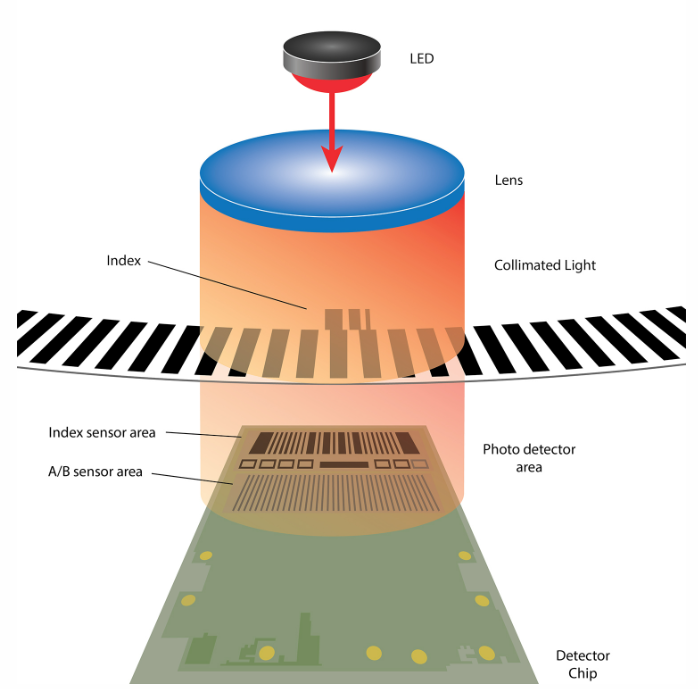
Optical rotary encoders use optical principles to detect changes in the scale on the encoder disc and convert these changes into pulse signals through photoelectric sensors. The optical sensor read head contains a light source and a photoelectric sensor. The light source is usually an LED that shines light onto the scales on the encoder disc. A photoelectric sensor is located opposite the light source and is used to detect changes in the scale.
Working principle:

4. linear encoder working principle
A linear encoder is a sensor designed to measure linear displacement or motion along a straight path. It converts the linear displacement of an object into an electrical signal, providing real-time feedback about the position and direction of movement. Typically, a linear encoder consists of a stationary read head and a movable scale or strip attached to the object whose position is being measured.
The basic principle involves the detection of changes in the position of the scale relative to the read head, and this information is then transformed into an electrical signal. Linear encoders come in various types, including optical, magnetic, capacitive, and others, each utilizing different technologies to achieve accurate and precise position measurements.
Working principle:
The working principle of a linear encoder involves the conversion of linear displacement or motion into an electrical signal. Different types of linear encoders may employ various technologies, but here is a general overview of the working principle:

Components:
Scale or Strip: The object whose position is being measured has a linear scale or strip attached to it. This scale usually contains patterns, marks, or features that can be detected.
Read Head: The read head is a stationary component that is positioned close to the scale. It typically contains sensors or detectors sensitive to the features on the scale.
Working steps:
1. Illumination of Scale: The light source illuminates the scale or strip, and the light interacts with the features on the scale.
2. Detection of Features: As the scale moves relative to the read head due to linear motion, the photodetectors detect changes in the illuminated features. These features can be variations in transparency, marks, or patterns on the scale.
3. Signal Generation: The detected changes in the features result in variations in the amount of light reaching the photodetectors. This information is converted into an electrical signal.
4. Output Signal: The electrical signal, often in the form of pulses, represents the linear position or displacement of the object. The frequency or count of the pulses corresponds to the distance traveled or the position along the linear path.